

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-04-01
Kann Bus -Grenzfläche des absoluten photoelektrischen Wellencodierers
1 Einführung Der Absolut -Forum -Encoder für photoelektrische Wellenwinkel ist ein digitales Winkelmessgerät, das die Winkelposition und Winkelgeschwindigkeit der rotierenden Schacht in Echtzeit misst. Es wandelt die Wellenwinkelinformationen in Form von Grad, Minuten und Sekunden in digitale Codes um, und die Busverbindung kann eine Echtzeitmessung realisieren. Es hat die Vorteile einer hohen Arbeitszuverlässigkeit, einer starken Anti-Interferenz-Fähigkeit, einer hohen Präzision, dem Potenzi-off-Speicher und so weiter. Es wird häufig für die Verfolgung und Positionierungssysteme für digitale Messungen wie die Aufnahmebereiche, das digitale Theodolit, das Radar und einige große militärische Geräte verwendet.
In diesen praktischen Anwendungssteuerungssystemen wird aufgrund der verschiedenen Datenstrukturen der Sensoren und Detektoren jedes Subsystems der absolute photoelektrische Wellencodierer unterschiedliche interne Datenkommunikationsmethoden verwendet, die hauptsächlich RS232, RS485 / 488 Serienports, parallele Ports usw. enthalten. . In bestimmten technischen Anwendungen sind die oben genannten Kommunikationsmethoden jedoch häufig durch Übertragungsentfernung und Kommunikationsrate begrenzt. In den letzten Jahren hat sich eine serielle Kommunikation schnell entwickelt und eine Vielzahl von Feldbusformen des Kontrollsystems entstanden. Der CAN -Bus ist einer der am häufigsten verwendeten. Es ist die Abkürzung des Controller Local Area Network-Busses und eine effektive Unterstützung für verteilte Kontrolle und Echtzeitkontrolle. Serienkommunikationsnetzwerk. Aufgrund der hohen Leistung, der hohen Zuverlässigkeit und des einzigartigen Designs von CAN-Bus ist es zum beliebtesten und in Echtzeit am In- und Ausland. Die Entwicklung und Änderungen interner Kommunikationsmethoden im Steuerungssystem machen den Encoder, der zur Messung der Winkelverschiebung und der Winkelgeschwindigkeit verwendet wird, eine CAN -Bus -Schnittstelle zur Erfüllung der Fieldbus -Designanforderungen des gesamten Steuerungssystems.
2 Encoder -Arbeitsprinzip und Datenübertragung
2.1 Arbeitsprinzip Der Encoder besteht aus zwei Teilen: einem Datenerfassungsgerät und einem Datenverarbeitungsgerät. Das Strukturblockdiagramm ist in 1 dargestellt. Der Einzelchip -Mikrocomputer ist der Kernteil des Encoder -Schaltungssystems. Nach dem Sammeln der Encoder -Signale (Grobcode, mittelfeiner Code, Feincode) wird er durch Feincode, Codekanalkorrektur, digitale Addition, elektrische Nullanpassung, Softwareverarbeitung wie Abschluss, Minute und zweite Konvertierung unterteilt und schließlich angezeigt und angezeigt und schließlich angezeigt und Erkennen Sie die Schnittstelle mit dem Steuerungssystem.
2.2 Datenübertragung Die Datenübertragung zwischen dem Encoder und dem Steuerungssystem kann sowohl in parallelen als auch in seriellen Modi verwendet werden. Parallele Übertragung überträgt Daten über den parallelen Port. Jedes Daten erfordert einen Kern des Datenkabels. Beispielsweise ist für einen 24-Bit-Encoder ein 24-Kern-Kabel erforderlich. Daher ist der Nutzungsraum begrenzt und ist nur für die Kurzstreckenübertragung und besondere Anforderungen geeignet. Gelegenheit. Bei der seriellen Übertragung werden Dateninformationen seriell über ein verdrehtes Paar übertragen, und zusätzliche Bits werden nach verschiedenen Kommunikationsprotokollen hinzugefügt, um Funktionen wie Fehlerkorrektur zu implementieren. Diese Funktion kann auf Datenbussysteme erweitert werden. Die serielle Übertragung verfügt über weniger Kabel, weniger Hardware, niedrige Kosten, lange Übertragungsabstand sowie sichere und zuverlässige Daten.

2.3 Vorgeschlagener Encoder Can Can -Bus -Schnittstelle im umfassenden Vergleich verschiedener Feldbusse. Das auf CAN -Bus basierende Kommunikationssystem hat viele hervorragende Eigenschaften: Das Datensignal wird durch Differentialspannung übertragen; Das Bus -Getriebemedium kann verdrehtes Paar, Koaxialkabel und optische Faser verwenden. kann im Multi-Master-Modus und im flexiblen Kommunikationsmodus funktionieren; kann Daten in Punkt-zu-Punkt-, Punkt-zu-Multipoint- und globalem Broadcast-Modus übertragen und empfangen; Knoteninformationen im Netzwerk können in verschiedene Prioritäten unterteilt werden, um unterschiedliche Echtzeitanforderungen zu erfüllen. nicht zerstörerische Bus-Schiedsgerichtstechnologie; Die Daten werden kurze Rahmenstruktur angewendet, jeder Frame ist 8Byte und die Datenfehlerrate ist niedrig. Der Mac -Sublayer der Datenverbindungsschicht im Kommunikationsprotokoll hat strenge Fehlererkennungsfunktionen. Es hat internationale Standards und gute Offenheit. Bei der Transformation des internen Kommunikationsmodus des photoelektrischen Tracking -Systems wird der CAN -Bus daher als Datenkommunikationsbusstruktur verwendet, und dann wird der Encoder -CAN -Busschnittstellen vorgeschlagen.
3 Anwendung des Encoder -Can -CAN -Schnittstelle im photoelektrischen Tracking -System
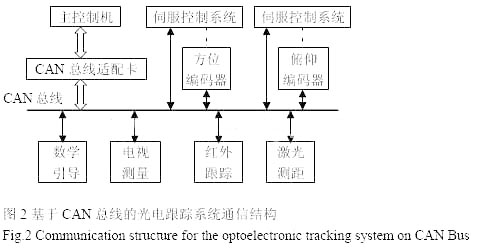
3.1 Der Encoder wird für die Positionserkennung des photoelektrischen Tracking -Systems verwendet. Der Absolute -Encoder der photoelektrischen Achse ist ein Sensor zur Messung des Azimut- und der Tonhöhenwinkel des photoelektrischen Tracking -Systems im photoelektrischen Tracking -System. Die interne Busstruktur des photoelektrischen Tracking -Systems wird in die CAN -Buskommunikationsmethode umgewandelt. Die CAN -Busschnittstelle hat die Eigenschaften einer flexiblen Schnittstelle und Leitungseinsparung. Gleichzeitig verfügt es über einen Mikroprozessor und kann als intelligenter Knoten im System verwendet werden, um Remote -Frames direkt an andere Geräte zu senden, um eine intelligente Kontrolle zu erreichen. Abbildung 2 ist ein Kommunikationsstrukturdiagramm des photoelektrischen Tracking -Systems basierend auf dem CAN -Bus. Das photoelektrische Tracking -System verwendet eine einzelne serielle Busstruktur von CAN -Bus anstelle der parallele Struktur mehrerer Kommunikationsmethoden. Die von den beiden photoelektrischen Encodern gemessenen Azimut- und Pech -Winkeln werden über den Bus an die Hauptsteuerungsmaschine gesendet, und die Hauptsteuerungsmaschine verarbeitet die Daten entsprechend. Durch das Servo-Steuerungssystem der Bussteuerung können alle Subsysteme durch zwei verdrehte Paare miteinander verbunden werden, die die Systemverkabelung vereinfachen, die Gesamtauslastung des Systems, die Echtzeitdatenübertragung und die Systemskalierbarkeit und den Bitfehler verbessert Die Rate wird stark verringert.
3.2 Encoder -Knoten CAN CAN -Hardware -Hardware -Komposition
Die CAN -Busschnittstelle besteht hauptsächlich aus Einzelchip -Mikrocomputer, CAN -Buscontroller, CAN -BUS -Treiber und fotoelektrische Isolationshardware. Die spezifische Schaltung der CAN -Buskommunikationsschnittstelle ist in Abbildung 3 dargestellt.
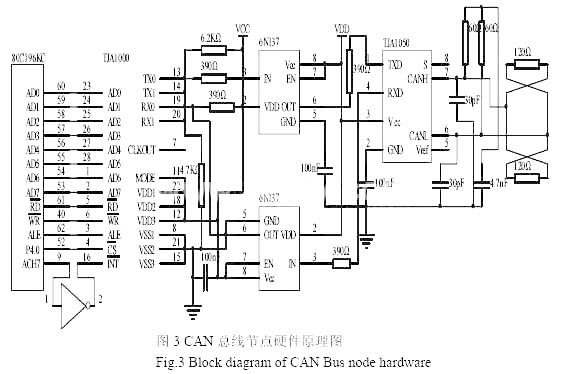
Der Single-Chip-Computer wählt Intel80C196KC aus, ein 16-Bit-eingebetteter Mikrocontroller, der besser für komplexe Echtzeit-Steuerungsanlässe geeignet ist. Es ist auch für die Datenverarbeitung des Encoders und die Initialisierung des CAN -Busknotens verantwortlich. Der Can Controller wählt den SJA1000 von Philips Semiconductor aus, um die Datenkommunikationsschnittstelle zwischen dem Bus und dem Host-Computer (Steuercomputer) zu realisieren, unterstützt Can2.0A- und CAN2.0B-Protokolle, verfügt -OUT (FIFO) -Prinzip, Unterstützung von 11-Bit- und 29-Bit-Identifikationscodes, Kommunikationsbitrate bis zu 1 Mbit / s, kann im Basiccan-Modus und im pelikanischen Modus funktionieren. Der CAN-Busfahrer wählt Philips TJA1050, der einen Hochgeschwindigkeits-CAN-Busfahrer ist, der die Schnittstelle zwischen dem CAN-Controller und dem physischen Bus liefert, die Differenzgetriebe- und Empfangsfunktionen des COS-Busses erkennt und über eine breite gemeinsame Modus-Reichweite verfügt Unter starken elektromagnetischen Interferenzdifferentialempfangsfunktionen ist der Eingangspegel mit 3,3 -V -Geräten kompatibel, und die Unpählerknoten stören den Bus nicht. Wenn Sie TJA1050 beitragen, können Sie die Hochgeschwindigkeitsdatenkommunikation sicherstellen. Verwenden Sie für die Sicherheit und die verbesserte Anti-Jamming-Fähigkeit die Verwendung von TJA1050 Guten symmetrischen Leistungseigenschaften separate Terminals. Zwei kleine Kondensatoren von 30PF sind parallel zwischen Canh und Canl und Masse angeschlossen, wodurch Hochfrequenzstörungen am Bus und eine bestimmte Fähigkeit zur Vorbeugung elektromagnetischer Strahlung herausgefiltert werden können. Um die Anti-Interferenz-Fähigkeit des Systems weiter zu verbessern, wird ein Hochgeschwindigkeits-Optokoppler 6N137 zwischen dem CAN-Controller SJA1000 und dem Dose Treiber TJA1050 verwendet, um eine Isolationsschaltung zu bilden, um eine galvanische Isolierung zu erreichen. Die Stromversorgungs -VCC und VDD auf beiden Seiten des 6N137 sind vollständig isoliert, wodurch die Schaltung gleichzeitig verhindern kann. An beiden Enden des Busses sollten zwei 120 € -Boden -Impedanzresistenten angeschlossen werden.
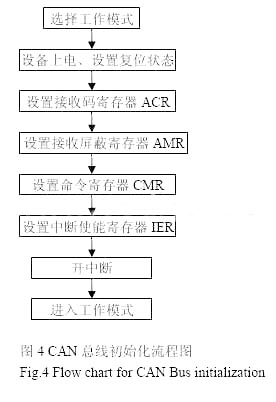
3.3 Knotensoftware Design Die Winkelinformationen (Grad, Minuten und Sekunden) des Absolutes -Encoders der photoelektrischen Achsen werden vom CAN -Controller an den CAN -Bus oder vom CAN -Bus zum CAN -Puffer vom SJA1000 -Buscontroller gesendet. Das Can CAN -Kommunikationsprogramm der Busschnittstelle besteht aus dem Initialisierungsunterprogramm, dem Senden des Subprogramms und dem Empfangsunterprogramm. Wählen Sie zuerst den CAN -Bus -Arbeitsmodus gemäß den tatsächlichen Systemanforderungen aus. Wählen Sie hier den Pelican -Modus, den 12 -MHz -Kristalloszillator aus, die Busdatenübertragungsrate wird auf 500 kbit / s gesetzt. Jeder Busknoten sollte die gleiche Datenübertragungsrate festlegen, um eine normale Kommunikation zu gewährleisten. Bestimmen Sie, dass die physische Verbindung zwischen SJA1000 und der MCU zuverlässig ist, und initialisieren Sie dann den SJA1000 -Controller. Stellen Sie im SJA1000 -Reset -Modus den Anfangszustand jedes Registers fest. Das Initialisierungsflussdiagramm ist in Abbildung 4 dargestellt. Die Übertragung und Rezeption von Daten wird durch die Sende -Unterroutine und die empfangende Unterroutine erreicht. Die Nachrichten -ID bestimmt den Fluss von Knotendaten. Beim Senden von Daten lautet das Einstellungsprinzip des Bit -Segments für Nachrichten -ID -Empfangs -Flag -Flag: Die entsprechende ID des Knotens, die empfangen werden muss, beträgt 0 und die verbleibenden Bits 1. Wenn Daten empfangen werden, ist es das Gegenteil. Es wird mit dem Ausweis beurteilt, ob es sich um Informationen handelt, die an sich selbst gesendet werden. Es wird empfangen, nicht gefiltert.
4. Fazit
Als Kommunikationsbus auf Feldebene hat Can Bus eine hohe Zuverlässigkeits- und Kostenleistung. Der absolute photoelektrische Wellencodierer mit CAN -Busschnittstelle macht es flexibler für die Verwendung in Steuerungssystemen.
Dieser Artikel ist innovativ: Die CAN -Busschnittstelle des Encoders und seine Anwendung im photoelektrischen Tracking -System
Aufteilen:
Anfrage versenden
Ms. carol Dong
Telefonnummer:86-431-85543703
Fax:86-431---88634119
Mobiltelefon:+8613894866263
E-Mail-Adresse:sales@encoders.com.cn
Firmenadresse:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
Mobile Seite
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.