

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-01-03
Encoder- und Anwendungsübersicht <br> Der Encoder ist ein elektromechanisches Gerät, mit dem die mechanische Bewegung oder die Zielposition gemessen werden kann. Die meisten Encoder verwenden optische Sensoren, um elektrische Signale in Form von Impulszügen bereitzustellen, die wiederum in Bewegung, Richtung oder Positionsinformationen umgewandelt werden können.
Rotationscodierer können verwendet werden, um die Rotationsbewegung der Welle zu messen. Abbildung 1 zeigt die grundlegenden Komponenten eines Rotationscodierers, einschließlich einer leichten Diode (LED), eines Coderads und eines leichten Sensors auf der Rückseite des Codrads. Dieses Coderad wird auf einer rotierenden Welle mit undurchsichtigen und lichtübergreifenden lüfterförmigen Bereichen gelegt, die in codierter Form angeordnet sind. Wenn sich das Coderad dreht, blockieren die undurchsichtigen Sektoren das Licht, und die Lichtübertragungssektoren lassen das Licht durchlaufen. Dies erzeugt quadratische Impulse, die in entsprechende Position oder Bewegungsinformationen kompiliert werden können. Der Encoder ist normalerweise in 100 bis 6000 Sektoren pro Revolution unterteilt. Dies zeigt, dass ein 100-Sektor-Encoder eine Genauigkeit von 3,6 Grad liefern kann, während ein 6000-Sektor-Encoder eine Genauigkeit von 0,06 Grad liefern kann.
Lineare Encoder funktionieren wie Rotary -Encoder. Es verwendet einen festen, undurchsichtigen Streifen, um den Rotationscodierer mit einigen lichtübertragenden Lücken auf der undurchsichtigen Streifenoberfläche zu ersetzen, und der LED-Detektoranbau ist an den sich bewegenden Körper befestigt.

Abbildung 1. Komponenten eines optischen Encoders
Nur ein Impulsausgangscodierer kann den Drehwinkel nicht bestimmen, daher ist er nicht nützlich. Wenn zwei Codekanäle verwendet werden und der Phasenunterschied zwischen ihren Sektoren 90 Grad beträgt (wie in Fig. 2 gezeigt), können die beiden Ausgangskanäle des Quadratur -Encoders die beiden Informationen der Position und der Drehrichtung bestimmen. Wenn beispielsweise Kanal A die Phase leitet, dreht sich der Encoder im Uhrzeigersinn. Wenn Kanal B die Phase führt, dreht sich das Coderad gegen den Uhrzeigersinn. Durch die Überwachung der Anzahl der Impulse und der relativen Phaseninformationen zwischen den Signalen A, B ist es daher möglich, die Position und die Richtungsinformationen der Rotation gleichzeitig zu erhalten.
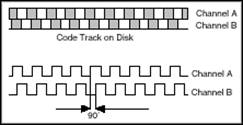
Abbildung 2. Ausgangssignale von Quadratur -Encodern A und B
Darüber hinaus enthalten einige Quadratur -Encoder einen dritten Ausgangskanal mit dem Namen Zero Signal oder Referenzsignal. Für jede Drehung dieses Kanals wird ein einzelner Impuls ausgegeben. Sie können diesen einzelnen Impuls verwenden, um eine Referenzposition genau zu berechnen. In den meisten Encodern wird dieses Signal als Z -Achse oder Index bezeichnet.
Bisher führte dieser Artikel einen inkrementellen Quadratur-Encoder mit einem endgültigen Quadrement ein. Da sowohl A- als auch B-Signale auf den Boden verwiesen werden, werden sie als Einzelgeplapper bezeichnet und jedes Signal hat nur eine (oder nur eine) Linie. Ein weiterer häufig verwendeter Encoder ist ein Differentialcodierer, und seine A- und B -Signale haben zwei Drähte. Die beiden Linien des A -Signals sind a und a, und die beiden Zeilen des B -Signals sind B 'bzw. B. Da diese vier Zeilen immer einen bekannten Level (0V oder VCC) ausgeben, wird diese Struktur auch als Push-Pull-Struktur bezeichnet. Wenn a VCC ist, ist a '0V. Umgekehrt ist ein VCC, wenn a 0V ist. Im Fall eines Ein-End-Encoders ist A entweder VCC oder schwebend. Die Verwendung der Differentialerkennung kann die Genauigkeit des Signals gewährleisten, sodass in Umgebungen mit großem elektrischem Rauschen normalerweise Differentialcodierer verwendet werden können.
Bei einem inkrementellen Encoder kann nur Positionsänderungsinformationen (aus denen die Bewegungsgeschwindigkeit und Beschleunigung berechnet werden können) gemessen werden, aber die absolute Position des Ziels kann nicht bestimmt werden. Hier werden wir einen dritten Typ von Encoder einführen: Absolute -Encoder, der die absolute Position des Ziels erhalten kann. Dieser Encoder verfügt aus wie der inkrementelle Encoder wechselt abwechselnd undurchsichtige Sektoren und transparente Sektoren. Ein absoluter Encoder verwendet jedoch eine Mehrkomponentenzone am Coderad des Encoders, um wie ein Zielring einen konzentrischen Codekanal zu bilden. Der konzentrische Codepfad beginnt in der Mitte des Encodercode und erstreckt sich nach außen bis zur Außenseite der Code -Karte. Jeder Codekanal hat die doppelte Partition als seine innere Ebene. Die erste Schicht, der innerste Codekanal, verfügt nur über einen Lichtübertragungssektor und einen undurchsichtigen Sektor. Die zweite Schicht in der Mitte verfügt über zwei lichtübergreifende Sektoren und zwei undurchsichtige Sektoren. Und es gibt vier lichtübergreifende Sektoren und undurchsichtige Sektoren für den dritten Codekanal. Wenn der Encoder 10 Layer -Codekanäle hat, hat der äußerste Codekanal 512 Sektoren. Wenn es 16 Ebenencodekanäle gibt, verfügt der äußerste Codekanal über 32.767 Sektoren.
Da der Absolute -Encoder mehr als eine Anzahl von Sektoren pro Codekanal hat als der darin darin, bildet die Anzahl der Sektoren ein binäres Zählsystem. In dieser Art von Encoder entspricht jeder Codekanal auf dem Codelad einer Lichtquelle und einem Empfänger. Dies bedeutet, dass ein 10-Schicht-Encoder 10 Gruppen von Lichtquellen und Empfängern benötigt, während ein 16-Schicht-Encoder 16 Gruppen von Lichtquellen und Empfängern benötigt.
Der Vorteil eines absoluten Encoders besteht darin, dass Sie die Geschwindigkeit des Encoders reduzieren und den Coder des Encoders während des gesamten Maschinenbewegungszyklus nur eine Revolution machen können. Wenn die Maschine 10 Zoll fährt und der Encoder 16 Bit Genision aufweist, beträgt die Genauigkeit der Maschinenposition 10/65.536 oder 0,00015 Zoll. Wenn die Maschine länger fährt, z. B. 6 Fuß, kann ein grober Rotary -Encoder sicherstellen, dass jeder Fuß verfolgt wird. Eine zweite Stufe, die als feiner Rotary -Encoder bezeichnet wird, kann Entfernungen innerhalb von 1 Fuß verfolgen. Dies bedeutet, dass Sie den groben Encoder so einstellen können, dass er sich um den gesamten 6-Fuß-Abstand dreht. Sie können den dünnen Encoder auch so einstellen, dass er einen Bereich von 1 Fuß (oder 12 Zoll) auflösen kann.
So messen Sie mit einem Encoder <br> einen Encoder zur Messung, und muss ein grundlegendes elektronisches Gerät, den Zähler, geben. Der grundlegende Zähler erzeugt einen Wert über seine mehreren Eingangskanäle, um die Anzahl der erkannten Kanten anzuzeigen (dh ändert sich in der Wellenform von niedrig bis hoch oder hoch). Die meisten Zähler haben drei miteinander verbundene Eingänge, Quellen- und Up/Down-Auswahl. Der Zähler zeichnet die Anzahl der Ereignisse in der Quelleingabe auf und zählt nach dem Status der UP/Down -Auswahllinie nach oben oder unten. Zum Beispiel: Wenn das Auf-/Ab -Status -Bit "hoch" ist, zählt der Zähler auf. Wenn das Auf-/Ab -Status -Bit "niedrig" ist, zählt der Zähler. Abbildung 3 zeigt ein vereinfachtes Gegenblockdiagramm.

Abbildung 3. vereinfachtes Modell des Zählers
Encoder haben normalerweise 5 Drähte, die verbunden werden müssen. Unterschiedliche Encoder, die Farbe dieser Linien ist nicht gleich. Sie können diese Drähte verwenden, um den Encoder mit den Signalen A, B und Z zu lesen. Abbildung 4 zeigt eine typische Schnittstellendefinition für einen inkrementellen Encoder.

Abbildung 4. Inkrementelle Encoder -Schnittstelle
Der nächste Schritt besteht darin, zu entscheiden, wo diese Linien verbunden werden sollen. Wie oben erwähnt, ist das Signal A mit dem Quellanschluss verbunden und die Impulse in seinem Signal werden gezählt. Signal B ist mit dem Auf und Ab -Auswahlanschluss der Auf und Ab -Auswahl angeschlossen. Schließen Sie eine beliebige +5-V-DC-Stromversorgung an die Inmätigkeiten der Strom- und Bodenverbindungen an. In den meisten Fällen ist nur eine digitale Linie für ein Datenerfassungsgerät ausreichend.
Da die Signalkanten gezählt werden, müssen Sie als nächstes berücksichtigen, wie diese Werte in Positionsinformationen umgewandelt werden sollten. Der Prozess der Konvertierung des Kantenwerts in Positionsinformationen hängt von der Art der verwendeten Codierung ab. Es gibt drei grundlegende Codierungstypen: x1, x2 und x4.
X1 codieren
Abbildung 5 zeigt die Anzahl der Plus-Minus-Zahlen für einen Quadraturzeitraum und den entsprechenden X1-Codierungsart. Wenn Kanal A Kanal B führt, tritt das Inkrement am steigenden Rand von Kanal A auf
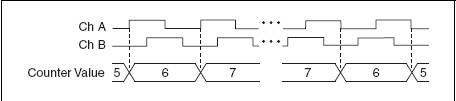
Abbildung 5. x1 -Codierung
X2 Codierung
Die X2 -Codierung ähnelt dem obigen Vorgang, mit der Ausnahme, dass jede Kantenzahl des Zählers ein Kanal inkrementiert oder verringert wird, je nachdem, welcher Kanal kanalisiert wird. Der Wert des Zählers steigt um 2 oder nimmt in jedem Zyklus um 2 ab, wie in Abbildung 6 dargestellt.

Abbildung 6. x2 Codierung
X4 Codierung
Im X4 -Codierungsmodus nimmt der Zähler auch an jedem Rand der Kanäle A und B zu oder nimmt ab. Ob die Anzahl der Zähler zunimmt oder abnimmt, hängt davon ab, welcher Kanal welcher Kanal führt. Die Anzahl der Zähler steigt um 4 oder sinkt um 4 Zyklus um 4.
Sobald Sie den Codierungstyp und den Impulszählertyp festgelegt haben, können Sie die folgende Formel verwenden, um numerische Informationen in die Positionierung von Informationen zu konvertieren:
Für Rotationsposition
Rotationsmenge ![]()
Wobei n = Anzahl der vom Encoder erzeugten Impulse während jeder Drehung der Welle erzeugt werden
x = Codierungsart
Für lineare Position
Verschiebung ![]()
Wobei PPI = Impuls pro Zoll (dieser Parameter bezieht sich auf den ausgewählten Encoder)
Wenn Sie den Encoder mit dem Instrument <br> in diesem Abschnitt anschließen , nehmen Sie das digitale I/A-Modul der NI 9401 C-Serie als Beispiel das digitale I/A-Modul NI 9401 C an. Die Verwendung verschiedener Messinstrumente und -geräte ähnelt diesem Prozess.
Geräte verwendet:
CDAQ-9172: Ni Compactdaq 8-Slot Hispeed USB-Chassis
NI 9401: 8-Kanal, 5 V/TTL Hochgeschwindigkeit, bidirektionales digitales E/A-Modul
24 -Impuls/Rotation -Quadratur -Encoder
Der NI 9401 verfügt über einen D-Sub-Anschluss, der Konnektivität für 8 digitale Kanäle bietet. Jeder Kanal verfügt über einen digitalen E/A -Port, der mit einem digitalen Eingangs- oder Ausgabegerät verbunden werden kann. Nur durch die 5. und 6. Slots auf dem Chassis können Sie mit den beiden Zählern im CDAQ-9172 eine Verbindung herstellen; Setzen Sie daher den 9401 in den 5. Steckplatz ein.
Nach diesen Spezifikationen ist die Verbindung A am Encoder an Pin 14 angeschlossen und die Verbindung B ist an Pin 17 und "5 VDC -Leistung" an eine nicht verwendete Ziffernlinie angeschlossen, die auf "hoch" eingestellt ist. "" Stellen Sie eine Verbindung zu einem beliebigen COM -Port her.
Messen beginnen
Nachdem der Encoder mit dem Messgerät verbunden wurde, können Sie die grafische Programmiersoftware von NI LabView verwenden, um diese Daten zur Beobachtung und Analyse auf einen Computer zu übertragen.
Auszug aus: NI "Allgemeiner Messhandbuch"
Aufteilen:
Anfrage versenden
Ms. carol Dong
Telefonnummer:86-431-85543703
Fax:86-431---88634119
Mobiltelefon:+8613894866263
E-Mail-Adresse:sales@encoders.com.cn
Firmenadresse:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
Mobile Seite
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.