

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-04-09
Ein Encoder ist ein Gerät, das ein Signal (z. B. einen Bitstrom) oder Daten in ein Formular kompiliert und umwandelt, das für Kommunikation, Übertragung und Speicher verwendet werden kann. Der Encoder wandelt eine Winkelverschiebung oder eine lineare Verschiebung in ein elektrisches Signal um, wobei das erstere als Coderad bezeichnet wird und der letztere als Code -Lineal bezeichnet wird. Gemäß dem Auslesemodus kann der Encoder in Kontakttyp und Nichtkontakttyp unterteilt werden. Nach dem Arbeitsprinzip kann der Encoder in zwei Typen unterteilt werden: inkrementeller Typ und absoluter Typ. Der inkrementelle Encoder wandelt die Verschiebung in ein periodisches elektrisches Signal um, das dann in einen Zählimpuls umgewandelt wird, und die Anzahl der Impulse wird verwendet, um die Größe der Verschiebung darzustellen. Jede Position des absoluten Encoders entspricht einem bestimmten digitalen Code, sodass seine Anzeige nur mit den Start- und Endpositionen der Messung zusammenhängt, unabhängig vom Zwischenprozess der Messung.

Nach dem Erkennungsprinzip kann der Encoder in optisch, magnetisch, induktiv und kapazitiv unterteilt werden. Nach seiner Kalibrierungsmethode und der Signalausgangsform kann es in drei Typen unterteilt werden: inkrementell, absolut und hybrid.
1.1 Inkrementeller Encoder Der inkrementelle Encoder gibt direkt drei Sätze von Phasen der Quadratwellenimpuls A, B und Z durch photoelektrische Konvertierungsprinzip aus; Der Phasenunterschied zwischen A- und B -Impulsen beträgt 90 Grad, so dass die Rotationsrichtung leicht bestimmt werden kann. Die Z -Phase ist ein Impuls pro Revolution und wird zur Referenzpunktpositionierung verwendet. Sein Vorteil ist, dass die Prinzipstruktur einfach ist, die durchschnittliche mechanische Lebensdauer mehr als Zehntausende von Stunden sein kann, die Anti-Interferenz-Fähigkeit stark ist, die Zuverlässigkeit hoch ist und für eine Fernübertragung geeignet ist. Der Nachteil besteht darin, dass die absoluten Positionsinformationen der Wellenrotation nicht ausgegeben werden können.
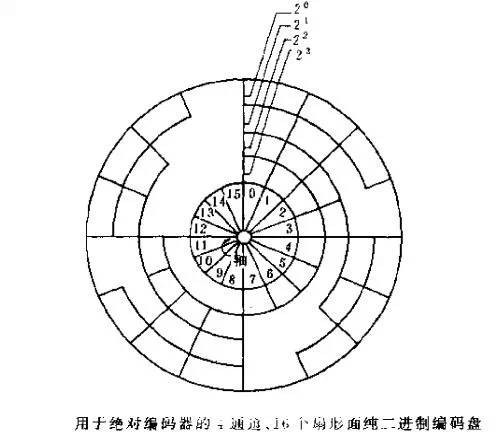
1.2 Absoluter Encoder Absolute Encoder ist ein digitaler Ausgangssensor. Es gibt mehrere konzentrische Scheiben in radialer Richtung auf seiner kreisförmigen Scheibe. Jede Fahrspur hat einen transparenten und undurchsichtigen Sektor. Der Sektorbaum des benachbarten Codekanals wird verdoppelt. Die Anzahl der Codekanäle am Codrad ist die Anzahl der Bits seiner binären Ziffer. Auf einer Seite der Scheibe befindet sich die Lichtquelle, und auf der anderen Seite befindet sich ein photosensitives Element, das jedem Codekanal entspricht. Wenn sich die Festplatte in verschiedenen Positionen befindet, wandelt jedes photosensitive Element ein entsprechendes Ebenensignal um, unabhängig davon, ob es beleuchtet ist oder nicht, und bildet eine binäre Zahl. Die Merkmale dieser Art von Encoder ist, dass kein Zähler erforderlich ist und ein fester digitaler Code, der der Position entspricht, an einer beliebigen Position der Rotationswelle gelesen werden kann. Müssen Sie natürlich n sagen? Gegenwärtig gibt es in China 16 absolute Encoderprodukte.
1.3 Hybrid Absolutes Encoder Hybrid Absolute Encoder, bei dem zwei Informationssätze ausgegeben werden. Ein Informationssatz wird verwendet, um die Magnetpolposition mit absoluter Informationsfunktion zu erkennen. Der andere Satz entspricht vollständig den Ausgabeinformationen des inkrementellen Encoders.
Zweitens die Anwendung des photoelektrischen EncodersDer Unterschied zwischen inkrementellem Encoder und absolutem Encoder
1, Winkelmessung
Der Autofahrsimulator verwendet einen photoelektrischen Encoder als Sensor zum Messen des Lenkwinkels des Lenkrads. Das Schwerkraft -Messinstrument verwendet einen photoelektrischen Encoder und verbindet seine rotierende Welle mit der Kompensationsknopfwelle des Schwerkraft -Messinstruments. Das Torsionswinkelmesser verwendet den Encoder, um die Änderung des Torsionswinkels wie der Torsionstestmaschine und des Fangstangenfischereistests zu messen. Die Pendel -Impact -Testmaschine verwendet den Encoder, um den Einfluss als Änderung des Schwungwinkels zu berechnen.
2, Längenmessung
Das Messgerät verwendet den Umfang der Walze, um die Länge und den Abstand des Objekts zu messen.
Der Drahtverschiebungssensor misst den Längenabstand des Objekts unter Verwendung des Umfangs des Wicklads.
Die direkte Messung der Kopplung wird mit der Spindel des Stromeinheits kombiniert, die die lineare Verschiebung antreibt, und wird anhand der Anzahl der Ausgangsimpulse gemessen.
Medienerkennung, im geraden Rack, das Kettenrad der rotierenden Kette, die Timing -Riemenscheibe usw., um lineare Verschiebungsinformationen zu übertragen.
3, Geschwindigkeitsmessung
Liniengeschwindigkeit, Messung der Liniengeschwindigkeit der Produktionslinie durch Anschließen mit dem Messgerät
Winkelgeschwindigkeit, Messung der Geschwindigkeit eines Motors, der Welle usw. durch einen Encoder
4, Positionsmessung
Auf der Maschinenseite die Koordinatenposition jedes Koordinatenpunkts der Werkzeugmaschine, z. B. eine Bohrmaschine usw.
In Bezug auf die Automatisierungsregelung führt die Steuerung die angegebene Aktion in der pastoralen Position durch. Wie Aufzüge, Hebezeuge usw.
5, synchrone Kontrolle
Durch die Winkelgeschwindigkeit oder lineare Geschwindigkeit wird die Übertragungsverbindung synchron gesteuert, um die Spannungsregelung zu erreichen.
Drittens inkrementeller Encoder (Rotary -Typ)
1, Arbeitsprinzip:
Eine optische Codescheibe mit einer Welle in der Mitte, mit einem ringförmigen Pass und einer dunklen gravierten Linie, die von einer photoelektrischen Übertragungs- und Empfangsvorrichtung gelesen wird, und vier Sätze Sinuswellensignale werden zu A, B, C, D, jeweils Sinus kombiniert Wellen -A -Phasendifferenz von 90 Grad (360 Grad relativ zu einem Zyklus), die C- und D -Signale umkehren, die auf den A- und B -Phasen überlagert werden, um das stabile Signal zu verbessern; und geben Sie einen Z-Phase-Impuls pro Revolution aus, um das Null-Referenzbit darzustellen.
Da die beiden Phasen A und B 90 Grad außerhalb der Phase sind, kann der Encoder erhalten werden, indem die A -Phase vor oder die B -Phase verglichen wird, um die Vorwärts- und Rückwärtsdrehung des Encoders zu bestimmen, und der Null -Referenzimpuls kann verwendet werden, um zu erhalten Die Null -Referenzposition des Encoders.
Das Material der Encoder -Code -Scheibe ist Glas, Metall und Kunststoff. Die Glascode -CD wird mit einer sehr dünnen gravierten Linie auf dem Glas abgelagert. Die thermische Stabilität ist gut und die Präzision ist hoch. Die Metallcode -CD wird direkt übergeben und die Linie ist nicht unterbrochen. Aufgrund der bestimmten Dicke des Metalls ist die Präzision begrenzt und ihre thermische Stabilität ist jedoch eine Größenordnung schlechter als die des Glass. Die Plastikcode -Festplatte ist wirtschaftlich und ihre Kosten sind gering, aber die Genauigkeit, die thermische Stabilität und das Leben sind beide schlecht. .
Auflösung-Die Anzahl der Durchgänge oder dunklen Linien, die der Encoder bei 360 Grad pro Revolution liefert, wird als Auflösung bezeichnet, auch als Auflösungsindexierung oder direkt nummerierte Linien bezeichnet, typischerweise 5 bis 10000 Zeilen pro Revolution.
2, Signalausgang:
Der Signalausgang hat eine Sinuswelle (Strom oder Spannung), Quadratwelle (TTL, HTL), Open Collector (PNP, NPN), Push-Pull-Typ, TTL ist ein langer Line-Differentialantrieb (symmetrisch a, a-; b, b -; Z, z-), HTL wird auch als Push-Pull, Push-Pull-Ausgang bezeichnet, und die Signalempfehende-Geräteschnittstelle des Encoders sollte dem Encoder entsprechen.
Signalverbindung-Das Impulssignal des Encoders ist im Allgemeinen an den Zähler, SPS, Computer angeschlossen. Die mit der SPS und des Computer angeschlossenen Module sind in Module mit niedriger Geschwindigkeit und Hochgeschwindigkeitsmodulen unterteilt. Die Schaltfrequenz ist niedrig und hoch.
Wie eine einphasige Verbindung, für die Zählung der einzelnen Richtungen, Einzelrichtungsgeschwindigkeitsmessung.
AB-Zwei-Phasen-Verbindung, verwendet für die Vorwärts- und Rückwärtszählung, die Vorwärts- und Rückwärts- und Geschwindigkeitsmessung.
A, B, Z Dreiphasenverbindung zur Positionsmessung mit Referenzpositionskorrektur.
A, A-, B, B-, Z, Z-Connection, aufgrund der Verbindung mit einem symmetrischen negativen Signal trägt der Strom zum elektromagnetischen Feld des Kabels bei 0, die Dämpfung ist minimal, die Anti-Interferenz ist optimal und der Ferngespräch kann übertragen werden.
Für TTL -Encoder mit einem symmetrischen negativen Signalausgang kann das Signal bis zu 150 Meter wandern.
Für HTL -Encoder mit einem symmetrischen negativen Signalausgang beträgt der Signalübertragungsabstand bis zu 300 Meter.
3, Das Problem des inkrementellen Encoders:
Inkrementelle Encoder haben einen kumulativen Fehler ohne Punkt, die Anti-Interferenz ist schlecht, die Empfangsausrüstung muss ausgeschaltet werden und die Leistung sollte in Null oder Referenzposition geändert werden. Diese Probleme können durch die Verwendung absoluter Encoder gelöst werden.
Allgemeine Anwendung inkrementeller Encoder:
Geschwindigkeitsmessung, Messung der Rotationsrichtung, Messung des Bewegungswinkels, Abstand (relativ).
Vier, absoluter Encoder (Rotary -Typ)Es gibt viele optische Kanalstecherlinien auf der absoluten Encoder -optischen Scheibe. Jede Zeile ist in 2 Zeilen, 4 Zeilen, 8 Zeilen, 16 Zeilen angeordnet, so dass jede Position des Encoders von jeder Zeile gelesen wird. Der Pass und die Dunkelheit des Absehens erhalten einen einzigartigen Binärcode (Graucode) von der Nullen-Leistung von 2 bis zur N-1-Leistung von 2, die als N-Bit-Absolut-Encoder bezeichnet wird. Ein solcher Encoder wird durch die mechanische Position der optischen Codescheibe bestimmt und wird nicht von Stromausfällen und Interferenzen beeinflusst.
Absolute Encoder sind in jeder Position einzigartig, die durch die mechanische Position bestimmt wird. Sie müssen nicht in Erinnerung bleiben, müssen keinen Referenzpunkt finden und nicht die ganze Zeit zählen, wann die Position kennt und wann sie ihre Position lesen soll. Auf diese Weise werden die Anti-Jamming-Eigenschaften des Encoders und die Zuverlässigkeit der Daten erheblich verbessert.
Von einzelnen Turn-Absolut-Encodern bis hin zu Multi-Turn-Absolut-Encodern
Drehen Sie den Absolute-Encoder mit einem Turn-Turn, um die Schreiberlinien des photoelektrischen Encoders in der Rotation zu messen, um den eindeutigen Code zu erhalten. Wenn die Rotation 360 Grad überschreitet, kehrt der Code in den Ursprung zurück, der dem Prinzip der absoluten Codierung nicht entspricht. Der Code kann nur für Messungen innerhalb eines Bereichs von 360 Grad Rotation verwendet werden, der als absoluter Einzel-Encoder als Einzelgedrehte bezeichnet wird.
Wenn Sie den Rotationsbereich über 360 Grad messen möchten, müssen Sie einen Multi-Turn-Absolut-Encoder verwenden.
Der Encoder -Hersteller verwendet das Prinzip des Wachgerätenmechanismus. Wenn sich das Codes-Codelad dreht, wird ein weiterer Satz von Coderädern (oder Sätze von Zahnrädern, mehrere Sätze von Codescheiben) vom Zahnrad angesteuert, und die Anzahl der Kurven wird auf der Grundlage der Einzel-Turn-Codierung erhöht. Codierung zur Erweiterung des Messbereichs des Encoders wird ein solcher absoluter Encoder als Multi-Turn-Absolut-Encoder bezeichnet, der auch durch mechanische Positionsbestimmung bestimmt wird, und jeder Positionscode ist eindeutig und muss nicht auswendig gelernt werden.
Ein weiterer Vorteil des Multi-Turn-Encoders besteht darin, dass aufgrund des großen Messbereichs die tatsächliche Verwendung häufig reicher ist, so dass es nicht erforderlich ist, während der Installation einen Nullpunkt zu finden, und eine Zwischenposition wird als Ausgangspunkt verwendet, welcher welche vereinfacht die Schwierigkeit der Installation und des Debuggens erheblich.
Aufteilen:
Anfrage versenden
Ms. carol Dong
Telefonnummer:86-431-85543703
Fax:86-431---88634119
Mobiltelefon:+8613894866263
E-Mail-Adresse:sales@encoders.com.cn
Firmenadresse:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
Mobile Seite
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.